Nautilus
Tether Management System
Our Latest Innovation
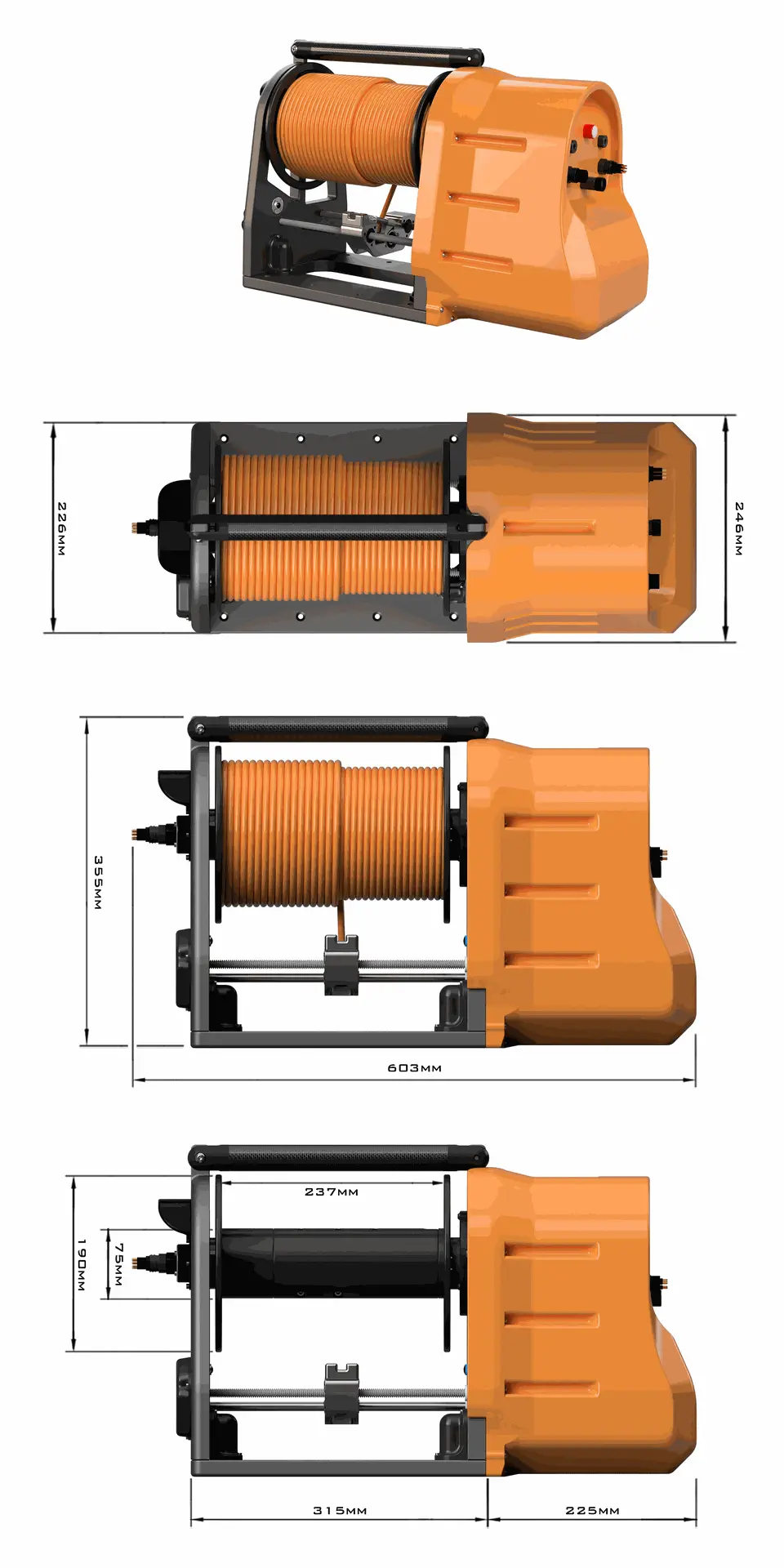
The Hybrid Robotics Nautilus Tether Management System (TMS) is a cost-effective, rugged, reliable smart winch for uncrewed surface vessels (USV).
The Nautilus offers the latest in technology without reducing functionality. It has onboard communication, high-torque electronic motors, a spool tensioner, and integrated braking. Its lightweight design allows for easy integration on any USV platform and adds to mission capability without downtime.
High Performance Mechanics
With a high drum torque (max 120Nm) and substantial spooling pull force (~40kg), the TMS is designed to handle demanding tasks effortlessly.
Compact Design
Despite its powerhouse capabilities, the TMS boasts a minimal footprint (604mm x 246mm x 355mm) and a lightweight build (21.3kg), making it ideal for seamless operations.
Future Ready Technology
The Nautilus’ software will be updated to integrate future technological advancements, enhancing its longevity and adaptability.
Robust Communication
All system communications are streamlined via LAN network for reliable and secure data transfer. The Nautilus TMS can be controlled through an onboard API as well as web-based interface.
Intelligent Control
The Nautilus TMS utilizes three independent motors for control, adjusting settings based on tether diameter and maintaining correct positioning during spooling.

Submersible & Versatile
The Nautilus is a versatile submersible designed for different marine environments, adjusting automatically to various tether specifications for optimal performance.
Reliable Memory
The Nautilus TMS remembers its last position, resuming operations smoothly after any interruption without manual intervention. Combined with a sturdy drum brake and leadscrew driven levelwind, it ensures stability and safety during operations.
Advanced Levelwind
The levelwind system uses motor encoders and redundant sensors for precise positioning, with an additional endstop sensor for safety. Tensioning system with pinch wheels maintains consistent tension for tethers and payloads.
Interested in a Nautilus Tether Management System?
Join us for a virtual demo to experience a Nautilus Tether Management System in action. The Director of Research & Design will guide you through the web interface, explore the backend documentation, and respond to any integration queries.
Specifications
Software
Communication ____________________________________________ Web Interface & API
Physical
Weight (No Tether) ____________________________________________________ 24kg
Continuous Motor Torque/Max Torque ______________________ 48nm/120nm
Continuous Pull Force _______________________________________________ 40kgf*
Brake Holding Torque _______________________________________________ 100nm
Max Pull Force ______________________________________________________ 140kg**
Max Spool Speed @ Rated Torque __________________________________ 24rpm
Typical Current/Peak Current ___________________________________ 0.5-10a/20a
Compatible Tether Diameter Range _____________________________4-15mm***
Slip-Ring Specs _________________________6 @ 24Vdc, 2 A / 2 @400 Vdc, 10A
Housing Rev1.3 Depth Rating _____ 50m (Tested)
Housing Rev1.4 Depth Rating ____ 100m (Target)
*Varies based on tether diameter and amount of tether on spool
**Drum stationary with brake applied
***Rev1.3 & Earlier only compatible with 4-11mm tether diameter
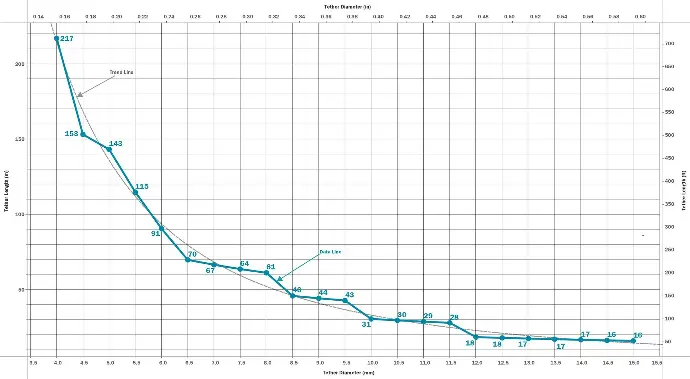
Compatible Tether Diameters
The Nautilus can hold tether with diameters from 4mm to 15mm. The length of tether that can be held is determined by the diameter of tether used. The chart shows the relationship between diameter and maximum length.
Integration
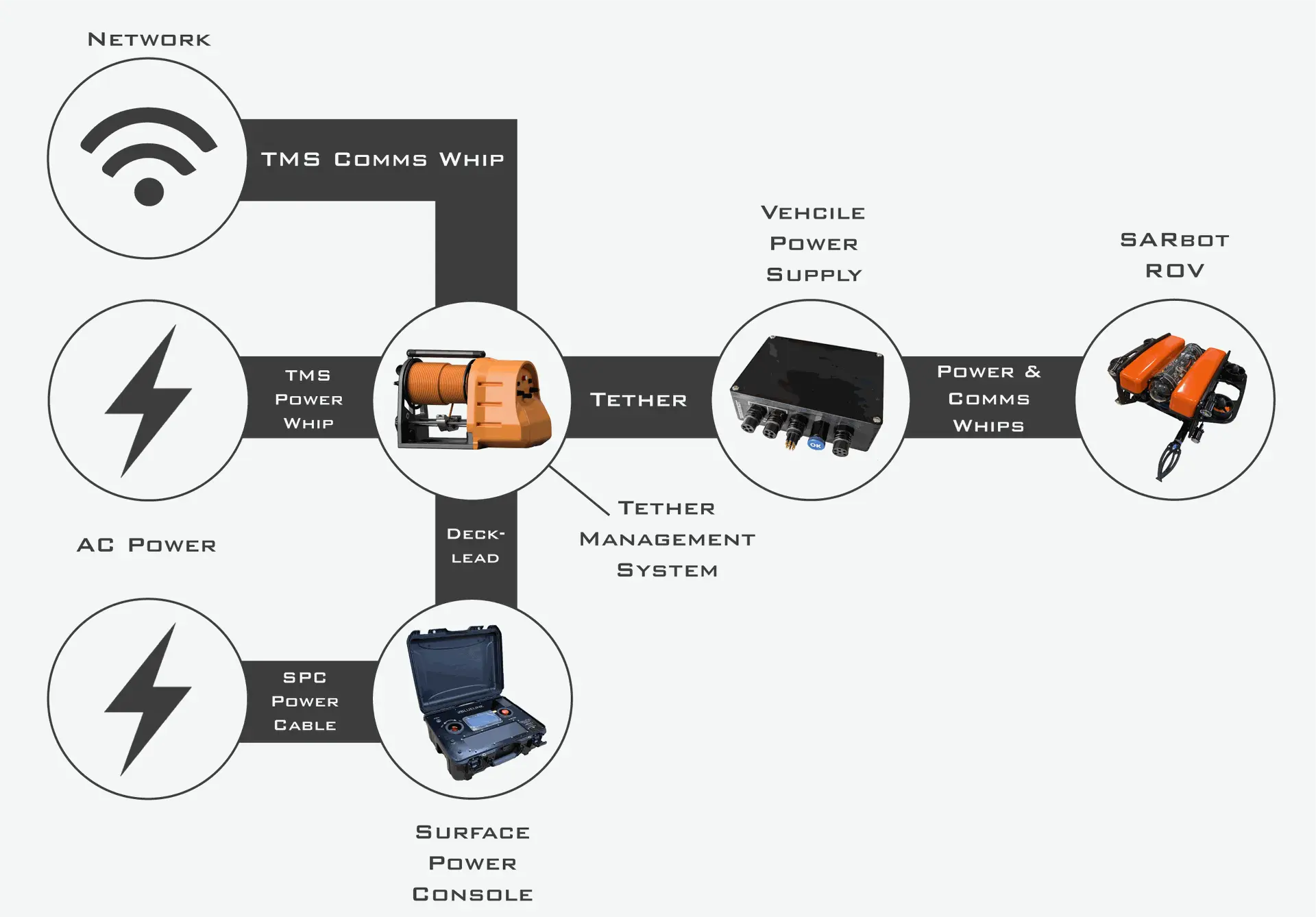
Tether Management System + Remote M1 Surface Power Console
Enhance your USV with a remote-controlled M1 Surface Power Console (SPC) to supply power to an ROV payload on the Nautilus. Our M1 Surface Power Console and Tether Management System work seamlessly together, enabling operators to remotely power and deploy loads from shore.
Downloads
Interested in Learning More?
Send us a message!

Responsive Customer Service
Our team is dedicated to providing top-notch customer service. If you require assistance with your Tether Management System, feel free to schedule a support meeting with our Director of Research and Design by clicking on the link below.